;
C34CL57T Rev.1

JUNE, 2025
Table of contents
1.0 OVERVIEW
This board interface is used for the connection between C76, C82, C86ACORN, C86MASSO, C35S, and Shihlin SDE(-P) Series Servo Motor
2.0 FEATURES
- RJ45 Connector for Axis.
- Select Jumper for Hard Enable or Soft Enable.
- Brake terminal.
- Select Jumper active Low and active High.
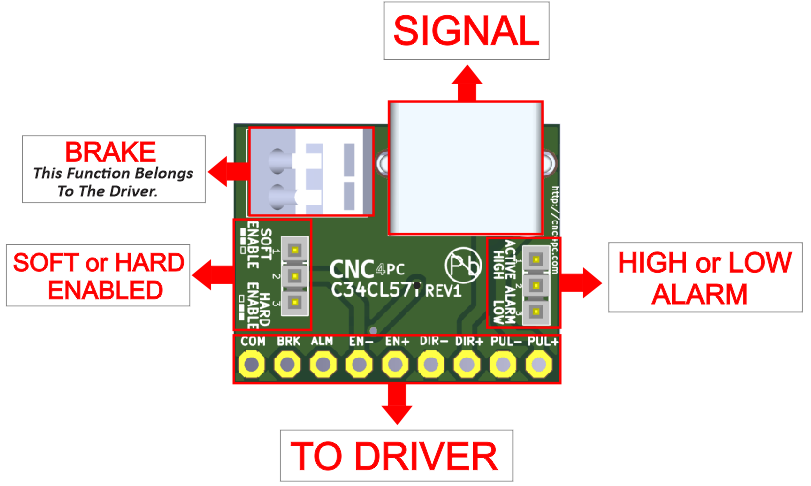
3.0 BOARD DESCRIPTION
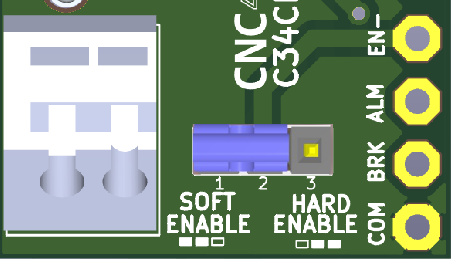
4.0 JUMPER TO SELECT THE ENABLE
Use
Software Enable to keep the driver active only while the system is active.
A set of jumpers is shown in the image.
SOFT ENABLE
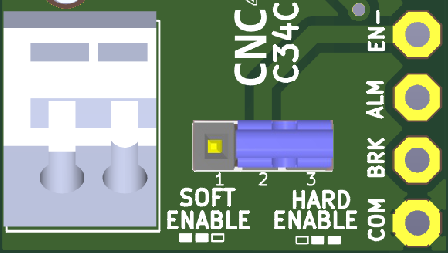
Use Hardware Enable to keep the driver enabled at all times.
A set of jumpers is shown in the image.
HARD ENABLE
JUMPER TO SELECT ACTIVE LOW AND ACTIVE HIGH
1-2: ACTIVE LOW

2-3: ACTIVE HIGH

5.0 PINOUT
RJ45 AND C34CL57T CONNECTION
RJ45 | FUNCTION |
1 | NC |
2 | STEP+ |
3 | NC |
4 | GND |
5 | SOFT ENABLE |
6 | DIR+ |
7 | NC |
8 | 5V |
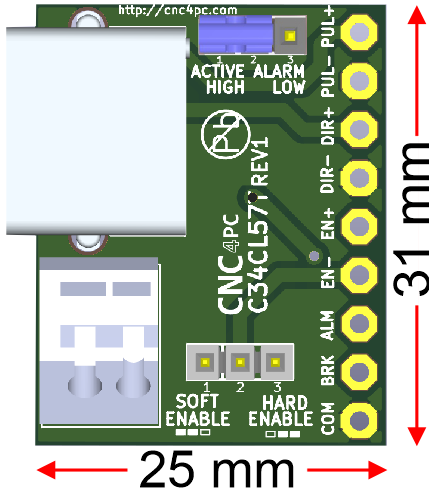
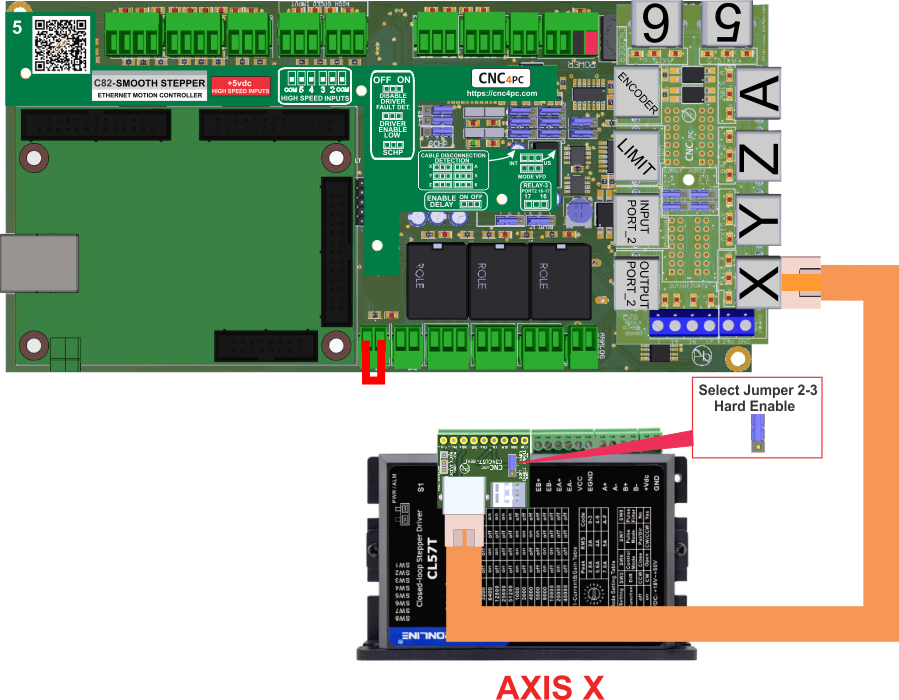
6.0 WIRING SAMPLE
7.0 DIMENSIONS