ED
ED
C34SGDA for YASKAWA SGDA Servo Drive Rev.1
JUNE, 2025
Table of contents
1.0 OVERVIEW
This board interface is used for the connection between C76, C82, C86ACORN, C86MASSO, C35S, and ASKAWA SGDA Servo Drive
2.0 FEATURES
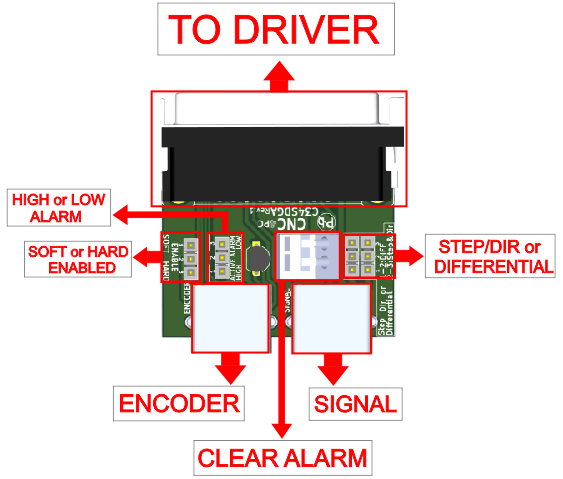
- DB36 Connector for Connecting Driver.
- RJ45 Connector for Axis.
- Encoder Output.
- Select Jumper for Hard Enable or Soft Enable.
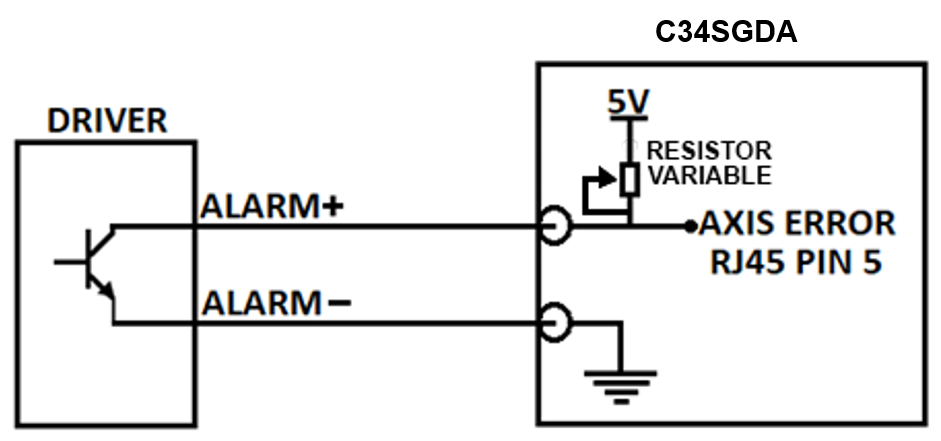
- Alarm terminal.
- Select a jumper for signal differentials.
- Terminals for the external drive feature a push-button.
- Select Jumper active Low and active High.
3.0 BOARD DESCRIPTION
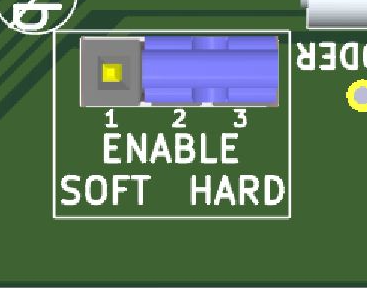
4.0 JUMPER TO SELECT THE ENABLE
Use
Software Enable to keep the driver active only while the system is active.
Set
of jumpers as shown in the image.
SOFT ENABLE
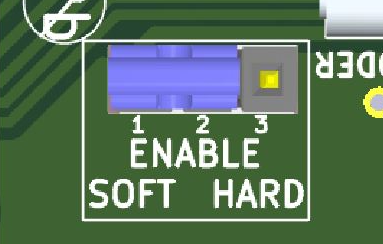
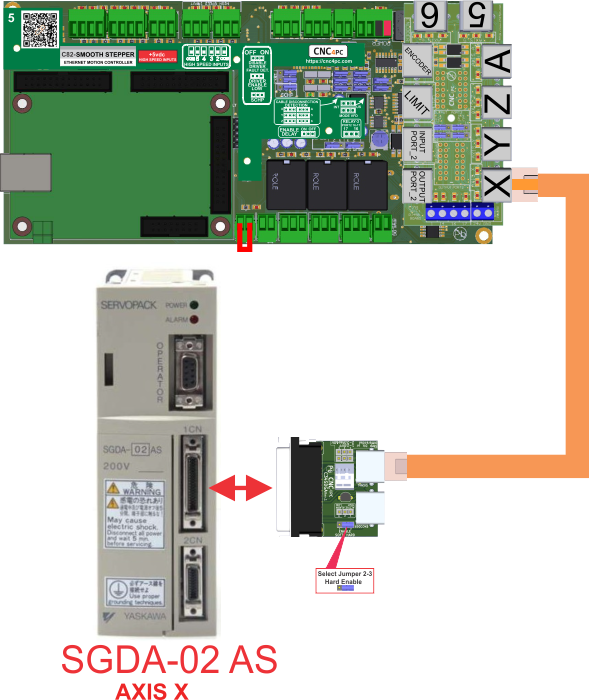
Use Hardware Enable to keep the driver enabled at all times.
A set of jumpers as shown in the image.
HARD ENABLE
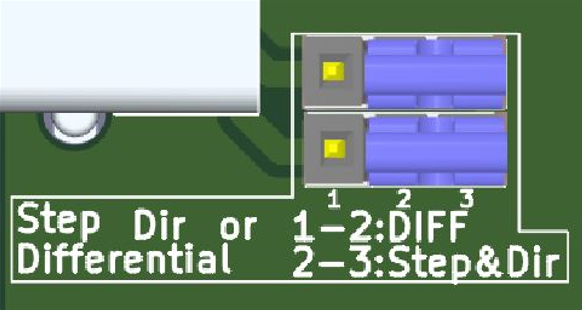
JUMPER TO SELECT THE DIFFERENTIAL
If working with the inputs of STEP and DIR as differential signals, you have to use the board, set the jumper as shown in the image.
DIFERENTIAL.
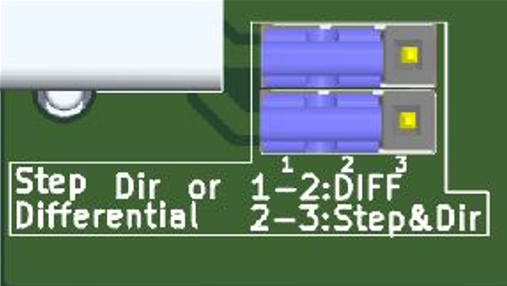
If not, use the differential signal for STEP & DIR, set the jumper as shown in the image.
STEP & DIR
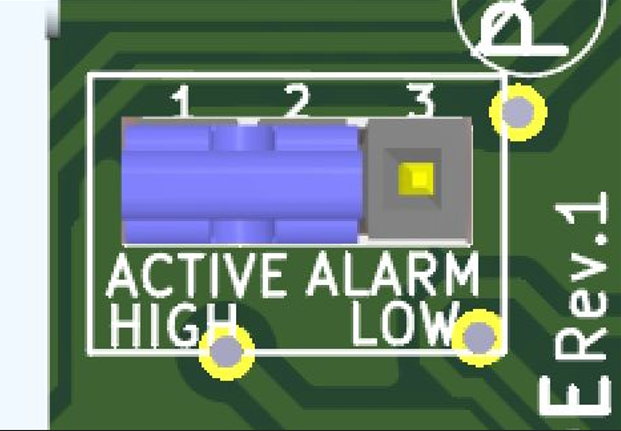
JUMPER TO SELECT ACTIVE LOW AND ACTIVE HIGH
1-2: ACTIVE
LOW 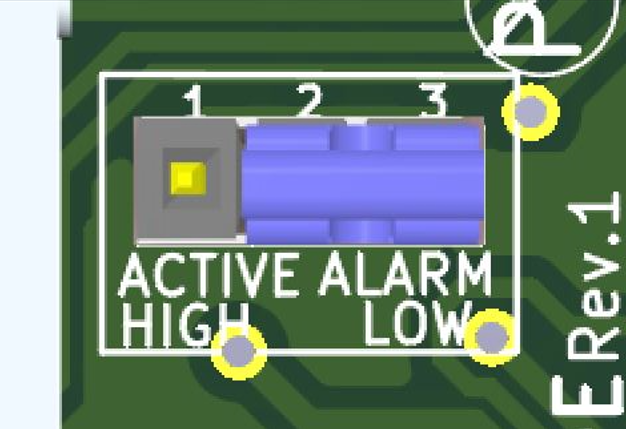
2-3: ACTIVE HIGH
5.0 PINOUT
6.0 PINOUT
RJ45 to C34SGDA CONNECTION
RJ45 | FUNCTION | DB36PIN |
1 | STEP- | 2 |
2 | STEP+ | 1 |
3 | DIR- | 4 |
4 | GND | 6,10,19,33,35 |
5 | SOFT EN | 14 |
6 | DIR+ | 3 |
7 | 24V | 13 |
8 | 5V |
|
ENCODER
RJ45 | FUNCTION | DB50PIN |
1 | GND | 6,10,19,33,35 |
2 | NC |
|
3 | C- | 25 |
4 | C+ | 24 |
5 | A- | 21 |
6 | A+ | 20 |
7 | B- | 23 |
8 | B+ | 22 |
7.0 WIRING SAMPLE
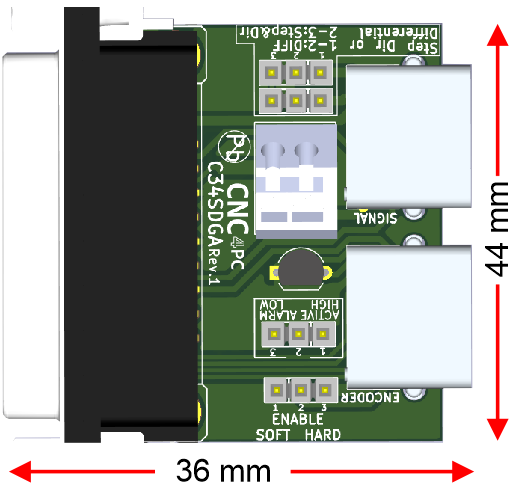
8.0 DIMENSIONS